本科生组 开放赛项 数字工业设计大赛
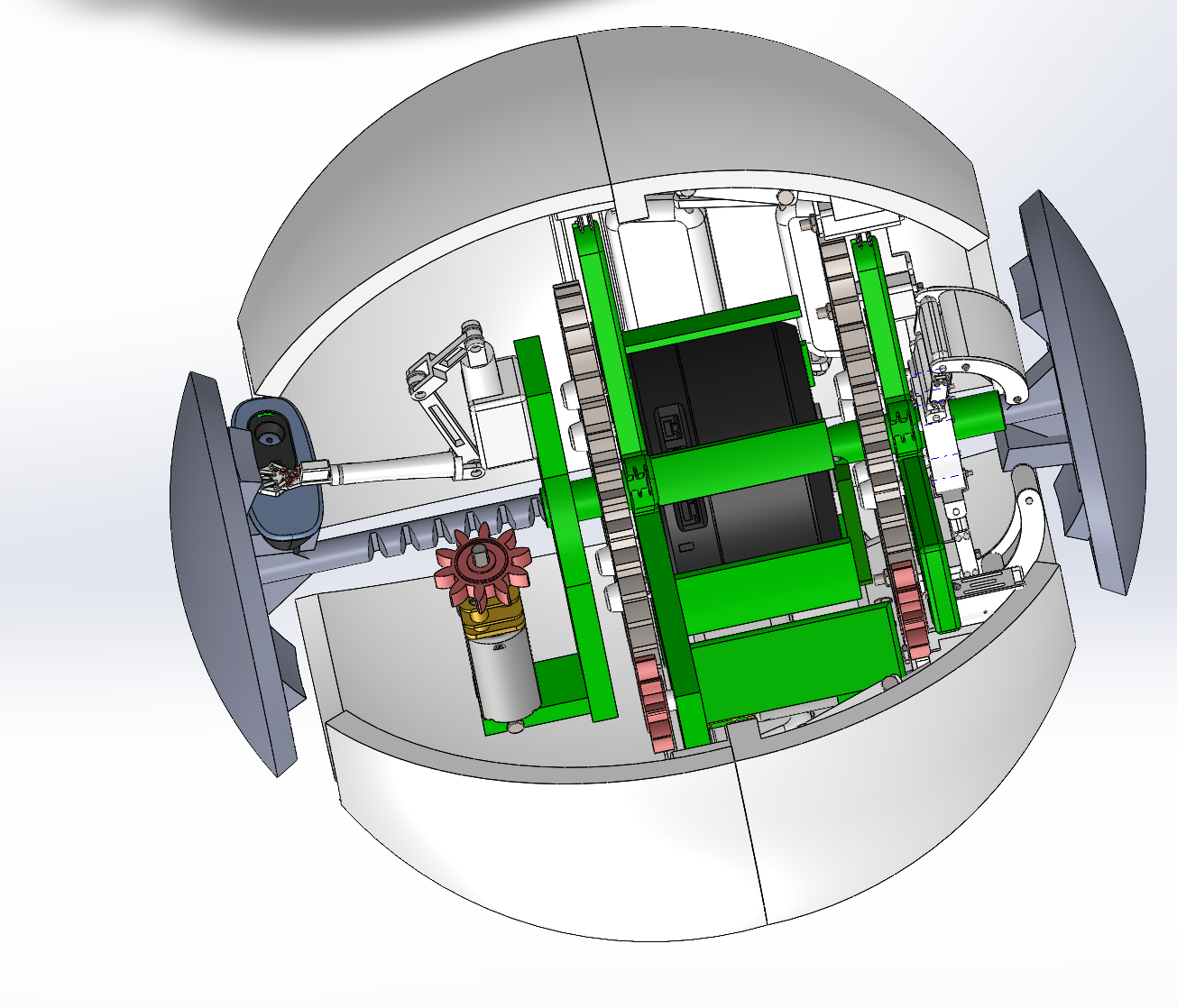
实现转向,攀爬复杂地形以及时时勘探的球形机器人
获赞金额: ¥0.00
作品评分:
作品评价: 0 条评论
赞 赏 量: 0 件
推 荐 指 数:0
推荐详情
收藏 赞赏
团队名称:叫人叫不齐队
人气作品排行热门收藏排行
查看本创客中心其它作品


 推荐
推荐